10.2.2. DIRAC pilots
This page describes what are DIRAC pilots, and how they work. To know how to develop DIRAC pilots, please refer to the Developers documentation.
Pilot development is done in https://github.com/DIRACGrid/Pilot
10.2.2.1. What’s a DIRAC Pilot
First of all, a definition:
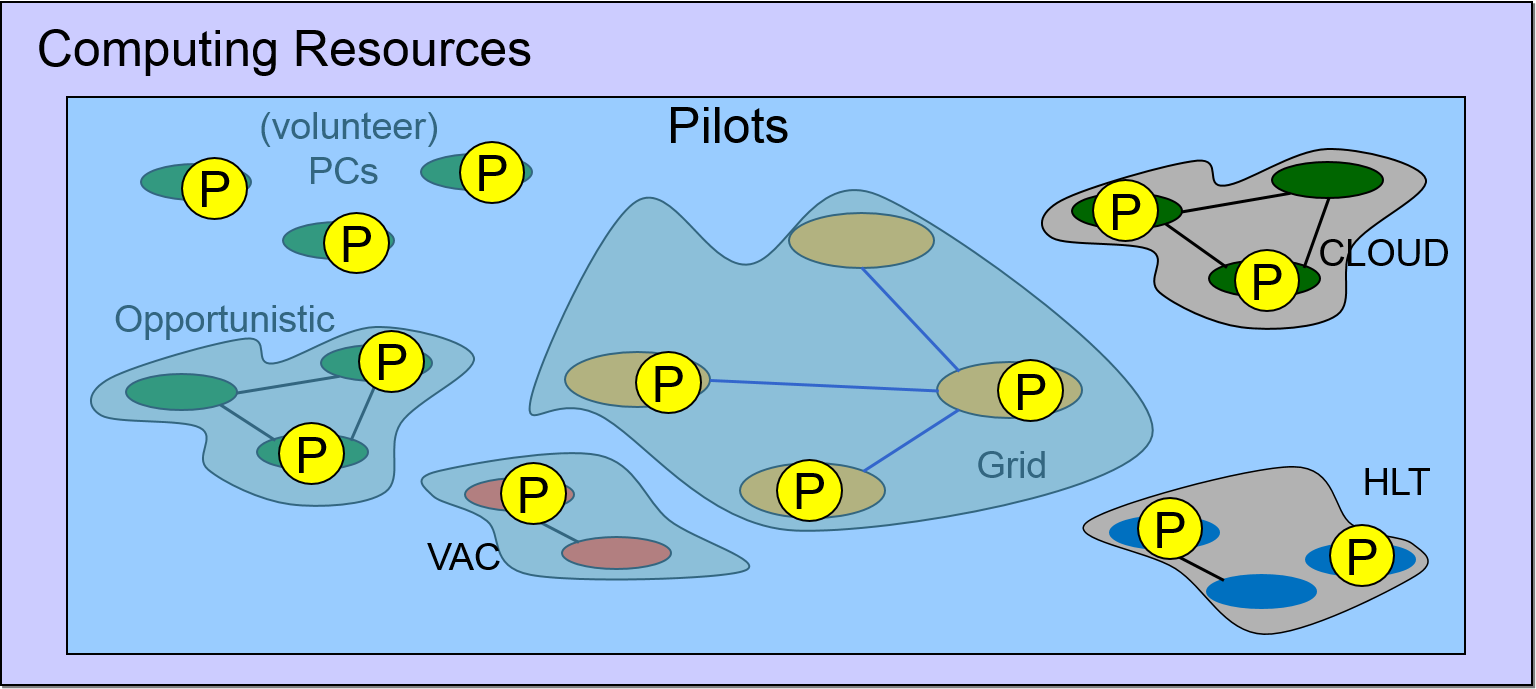
A pilot is what creates the possibility to run jobs on a worker node. Or, in other words:
a script that, at a minimum, setup (VO)DIRAC, sets the local DIRAC configuration, launches the an entity for matching jobs (e.g. the JobAgent)
A pilot can be sent, as a script to be run. Or, it can be fetched.
A pilot can run on every computing resource, e.g.: on CREAM Computing elements, on DIRAC Computing elements, on Virtual Machines in the form of contextualization script, or IAAC (Infrastructure as a Client) provided that these machines are properly configured.
A pilot has, at a minimum, to:
install or setup DIRAC, or an extension of it
configure DIRAC
run the JobAgent
where:
install means installing DIRAC like described in Installing DIRAC client
setup means that DIRAC code can already be found in the current file system, and it is only a matter of invoking a rc file that would add DIRAC paths
configure means adding dirac specific configuration files (which, at a minimum, should include the location of a DIRAC configuration service)
A pilot has to run on each and every computing resource type, provided that Python 2.6+ is on the WN. The same pilot script can be used everywhere.
In more details the DIRAC WMS with Pilot Jobs is described here.
10.2.2.2. Definitions that help understanding what’s a Pilot
TaskQueue: a queue of JDLs with similar requirements.
JobAgent: a DIRAC agent that matches a DIRAC local configuration with a TaskQueue, and extracts a JDL from it (or more than one).
pilot wrapper: a script that wraps the pilot script with conditions for running the pilot script itself (maybe multiple times).
pilot job: a pilot wrapper sent to a computing element (e.g. HTCondor, ARC).
The pilot is a “standardized” piece of code. The pilot wrapper might not be standardized.
The SiteDirector agent creates the pilot wrapper,
then sends it to a Computing Element as a pilot job.
But, if you don’t have the possibility to send a pilot job (e.g. the case of a Virtual Machine in a cloud), you can still find a way to start the pilot script by encapsulating it in a pilot wrapper that will be started at boot time, e.g. by supplying the proper contextualization to the VM.
10.2.2.3. Administration
The following CS section is used for administering the DIRAC pilots:
Operations/Defaults/Pilot
These parameters will be interpreted by the WorkloadManagementSystem/SiteDirector agents, and by the WorkloadManagementSystem/Matcher. They can also be accessed by other services/agents, e.g. for syncing purposes.
Inside this section, you should define the following options, and give them a meaningful value (here, an example is given):
# For the SiteDirector:
Version = 8.0.32 # DIRAC version(s) -- a comma-separated list can be provided
Project = myVO # Your project name: this will end up in the /LocalSite/ReleaseProject option of the pilot cfg, and will be used at matching time
Extensions = myVO # The DIRAC extension (if any)
Installation = mycfg.cfg # For an optional configuration file, used by the installation script.
PreInstalledEnv = /cvmfs/some/where/specific/bashrc # A specific rc file to source for setting up DIRAC
PreInstalledEnvPrefix = /cvmfs/some/where/ # Location where DIRAC installations can be found. The Pilot will then try and find the following: /cvmfs/some/where/{Version/}{platform}/diracosrc
CVMFS_locations = /cvmfs/some/ # Comma-separated list of locations where DIRAC installations, CAs and CRLs can be found. The Pilot will then try and find the following: /cvmfs/some/{releaseProject}dirac/{Version/}{platform}/diracosrc and /cvmfs/some/etc/grid-security/certificates. Those same locations will also be used by the Pilot Wrapper to try and find the pilot files in /cvmfs/some/{releaseProject}dirac/pilot/.
# For the Matcher
CheckVersion = False # True by default, if false any version would be accepted at matching level (this is a check done by the WorkloadManagementSystem/Matcher service).
Further details:
Version is the version of DIRAC that the pilots will install. Add the version of your DIRAC extension if you have one. A list of versions can also be added here, meaning that all these versions will be accepted by the Matcher (see below), while only the first in the list will be the one used by the pilots for knowing which DIRAC version to install (e.g. if Version=v7r0p2,v7r0p1 then pilots will install version v7r0p2)
Project is, normally, the same as Extensions
When the CheckVersion option is “True”, the version checking done at the Matcher level will be strict, which means that pilots running different versions from those listed in the Versions option will refuse to match any job. There is anyway the possibility to list more than one version in Versions; in this case, all of them will be accepted by the Matcher.
DIRAC versions are pre-installed on CVMFS in the following location: /cvmfs/dirac.egi.eu. From there /cvmfs/dirac.egi.eu/dirac contains DIRAC installations, like /cvmfs/dirac.egi.eu/dirac/v8.0.32, which can be sourced with . /cvmfs/dirac.egi.eu/dirac/v8.0.32/Linux-x86_64/diracosrc
10.2.2.4. Pilot Commands
The system works with “commands”, as explained in the RFC 18. Any command can be added. If your command is executed before the “InstallDIRAC” command, pay attention that DIRAC functionalities won’t be available.
Basically, pilot commands are an implementation of the command pattern. Commands define a toolbox of pilot capabilities available to the pilot script. Each command implements one function, like:
Check the environment
Get the pilot version to install
Install (VO)DIRAC
Configure (VO)DIRAC
In fact, there are several configuration commands
Configure CPU capabilities
Run the dirac-wms-cpu-normalization script, which calculates the CPU power of the node
Run the JobAgent
A custom list of commands can be specified using the –commands option to the pilot, or set in the Pilots’ configuration, but if nothing is selected then the following list will be run:
'GetPilotVersion', 'CheckWorkerNode', 'InstallDIRAC', 'ConfigureBasics', 'CheckCECapabilities',
'CheckWNCapabilities', 'ConfigureSite', 'ConfigureArchitecture', 'ConfigureCPURequirements',
'LaunchAgent'
Communities can easily extend the content of the toolbox, adding more commands. If necessary, different computing resources types can run different commands.
10.2.2.5. Pilot options
The pilot can be configured to run in several ways. Please, refer to https://github.com/DIRACGrid/Pilot/blob/master/Pilot/pilotTools.py for the full list.
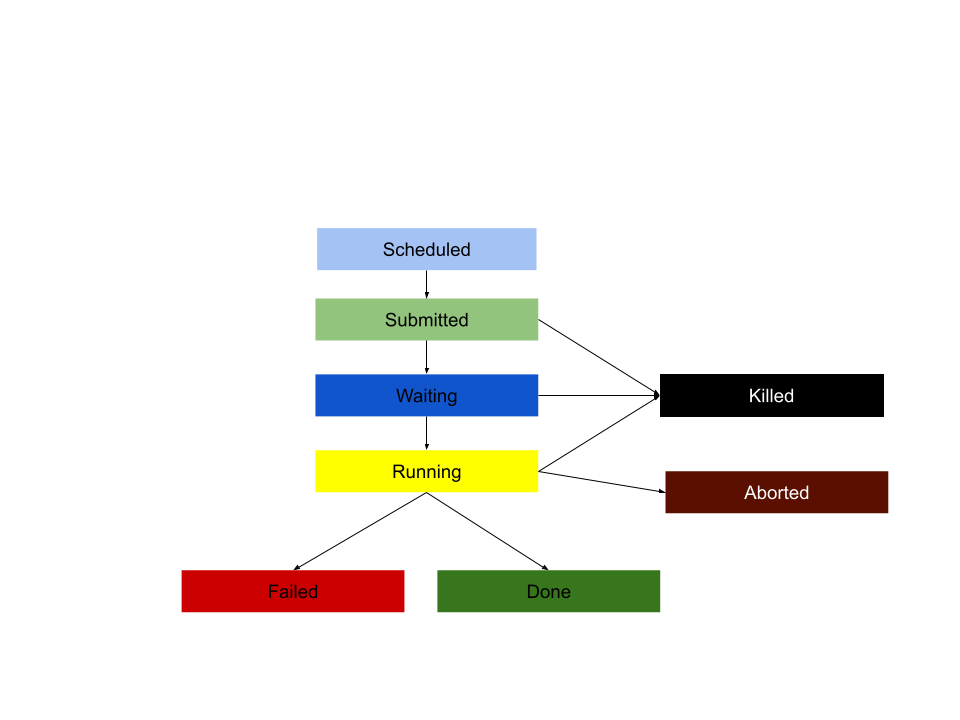
10.2.2.6. Pilot status
The pilot status of a successful pilot proceeds in the following order:
Submitted: the pilot goes from DIRAC to a remote site
Waiting: the pilot is waiting in a batch system queue of a site
Running: the pilot runs a payload on a worker node
Done: the pilot finished its execution
The basic flowchart describing the evolution of a pilot’s status follows
10.2.2.7. Pilot extensions
In case your VO only uses Grid resources, and the pilots are only sent by SiteDirector agents, and you don’t plan to have any specific pilot behaviour, you can stop reading here.
Instead, in case you want, for example, to install DIRAC in a different way, or you want your pilot to have some VO specific action, you should carefully read the RFC 18, and what follows.
Pilot commands can be extended. A custom list of commands can be added starting the pilot with the -X option.
10.2.2.8. Pilots started when not controlled by the SiteDirector
You should keep reading if your resources include IAAS and IAAC type of resources, like Virtual Machines. If this is the case, then you need to:
provide a certificate, or a proxy, to start the pilot;
such certificate/proxy should have the GenericPilot property;
in case of multi-VO environment, the Pilot should set the /Resources/Computing/CEDefaults/VirtualOrganization (as done e.g. by vm-pilot);
find a way to start the pilots: DIRAC will make sure to create VirtualMachine contextualized to start DIRAC Pilots.
We have introduced a special command named “GetPilotVersion” that you should use, and possibly extend, in case you want to send/start pilots that don’t know beforehand the (VO)DIRAC version they are going to install. In this case, you have to provide a json file freely accessible that contains the pilot version. This is tipically the case for VMs in IAAS and IAAC.
The files to consider are in https://github.com/DIRACGrid/Pilot
The main file in which you should look is dirac-pilot.py that also contains a good explanation on how the system works.
You have to provide in this case a pilot wrapper script (which can be written in bash, for example) that will start your pilot script with the proper environment. A simple example using the LHCbPilot extension follows:
#!/bin/sh
#
# Runs as dirac. Sets up to run dirac-pilot.py
#
date --utc +"%Y-%m-%d %H:%M:%S %Z vm-pilot Start vm-pilot"
for i in "$@"
do
case $i in
--dirac-site=*)
DIRAC_SITE="${i#*=}"
shift
;;
--lhcb-setup=*)
LHCBDIRAC_SETUP="${i#*=}"
shift
;;
--ce-name=*)
CE_NAME="${i#*=}"
shift
;;
--vm-uuid=*)
VM_UUID="${i#*=}"
shift
;;
--vmtype=*)
VMTYPE="${i#*=}"
shift
;;
*)
# unknown option
;;
esac
done
# Default if not given explicitly
LHCBDIRAC_SETUP=${LHCBDIRAC_SETUP:-LHCb-Production}
# JOB_ID is used by when reporting LocalJobID by DIRAC watchdog
#export JOB_ID="$VMTYPE:$VM_UUID"
# We might be running from cvmfs or from /var/spool/checkout
export CONTEXTDIR=`readlink -f \`dirname $0\``
export TMPDIR=/scratch/
export EDG_WL_SCRATCH=$TMPDIR
# Needed to find software area
export VO_LHCB_SW_DIR=/cvmfs/lhcb.cern.ch
# Clear it to avoid problems ( be careful if there is more than one agent ! )
rm -rf /tmp/area/*
# URLs where to get scripts, that for Pilot3 are copied over to your WebPortal, e.g. like:
DIRAC_PILOT='https://lhcb-portal-dirac.cern.ch/pilot/dirac-pilot.py'
DIRAC_PILOT_TOOLS='https://lhcb-portal-dirac.cern.ch/pilot/pilotTools.py'
DIRAC_PILOT_COMMANDS='https://lhcb-portal-dirac.cern.ch/pilot/pilotCommands.py'
LHCbDIRAC_PILOT_COMMANDS='https://lhcb-portal-dirac.cern.ch/pilot/LHCbPilotCommands.py'
#
##get the necessary scripts
wget --no-check-certificate -O dirac-pilot.py $DIRAC_PILOT
wget --no-check-certificate -O pilotTools.py $DIRAC_PILOT_TOOLS
wget --no-check-certificate -O pilotCommands.py $DIRAC_PILOT_COMMANDS
wget --no-check-certificate -O LHCbPilotCommands.py $LHCbDIRAC_PILOT_COMMANDS
#run the dirac-pilot script
python dirac-pilot.py \
--setup $LHCBDIRAC_SETUP \
--project LHCb \
--Name "$CE_NAME" \
--name "$1" \
--cert \
--certLocation=/scratch/dirac/etc/grid-security \