Developing Executors
The Executor framework is designed around two components. The Executor Mind knows how to retrieve, store and dispatch tasks. And Executors are the working processes that know what to do depending on the task type. Each Executor is an independent process that connects to the Mind and waits for tasks to be sent to it. The mechanism used to connect to the Executors is described in section about stable connections. A diagram of both components can been seen in the diagram.
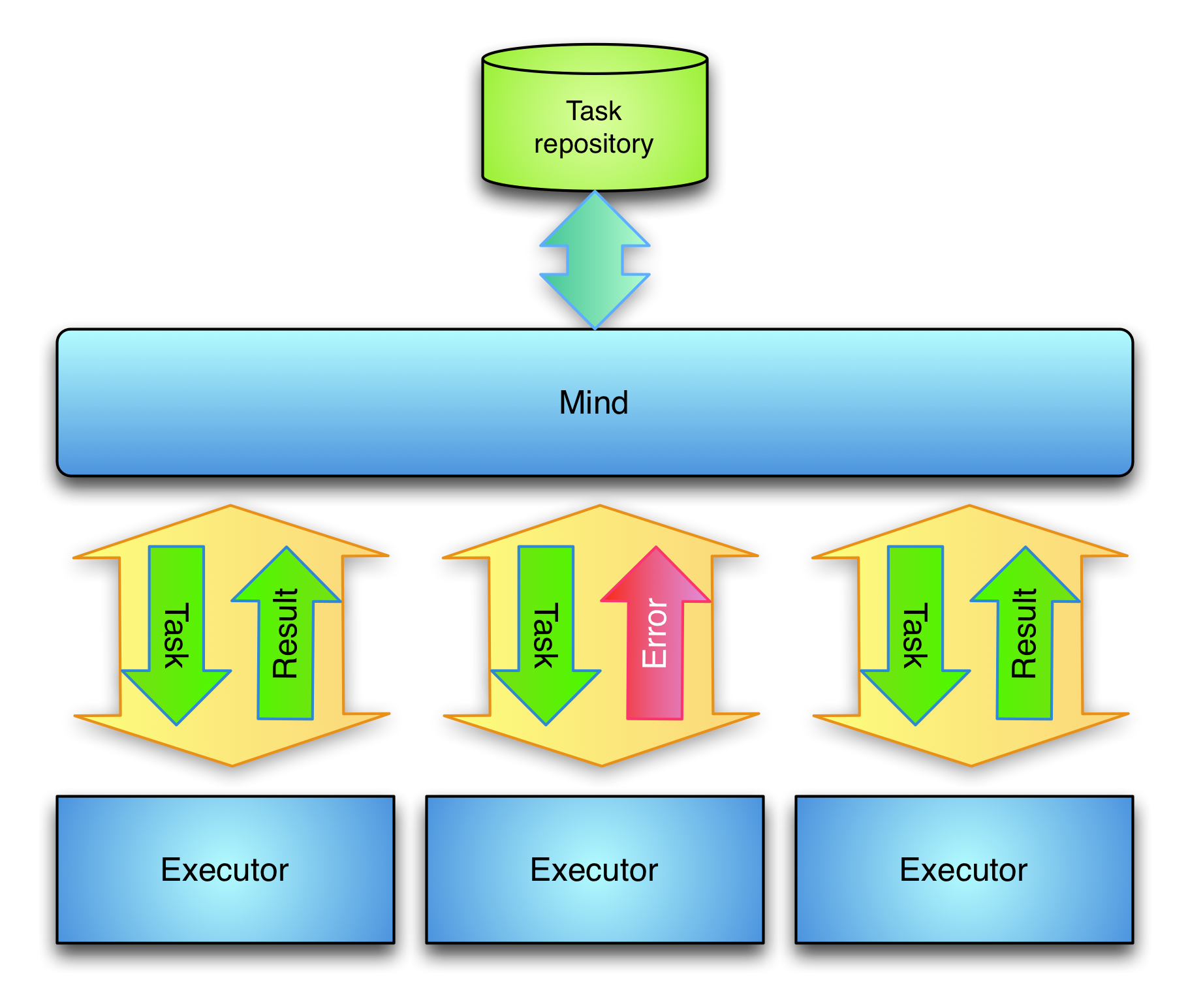
The Mind is a DIRAC service. It is the only component of the Executor framework that needs write-access to the database. It loads tasks from the database and writes the results back. The Mind can periodically query a database to find new tasks, but it can also receive new tasks from other components. Executors don’t keep or store the result of any task. If an Executor dies without having finished a task, the Mind will simply send the task to another Executor.
When the Mind receives a task that has been properly processed by an Executor, the result will have to be stored in the database. But before storing it in the database the Mind needs to check that the task has not been modified by anyone else while the executor was processing it. To do so, the Mind has to store a task state in memory and check that this task state has not been modified before committing the result back to the database. The task state will be different for each type of task and has to be defined in each case.
When an Executor process starts it will connect to the Mind and send a list of task types it can process. The acts as task scheduler and dispatcher. When the Mind has a task to be processed it will look for an idle Executor that can process that task type. If there is no idle Executor or no can process that task type, the Mind will internally queue the task in memory. As soon a an Executor connects or becomes idle, the Mind will pop a task from one of the queues that the can process and send the task to it. If the Executor manages to process the task, the Mind will store back the result of the task and then it will try to fill the Executor again with a new task. If the Executor disconnects while processing a task, the Mind will assume that the Executor has crashed and will reschedule the task to prevent any data loss.
Tasks may need to go through several different steps before being completely processed. This can easily be accomplished by having one task type for each step the task has to go through. Each Executor can then publish what task types it knows how to process. For each step the task has to go through, the Mind will send the task to an Executor that can process that type of task, receive and store the result, change the task to the next type and then send the task to the next Executor. The Mind will repeat this mechanism until the task has gone through all the types.
This architecture allows to add and remove Executors at any time. If the removed Executor was processing a task, the Mind will send the task to another Executor. If the task throughput is not enough, new Executors can be started and the Mind will send them tasks to process. Although Executors can be added and removed at any time, the Mind is still a single point of failure. If the Mind stops working the whole system will stop working.
Implementing an Executor module
Implementing an executor module is quite straightforward. It just needs 4 methods to be implemented. Here’s an example:
1from DIRAC import S_OK
2from DIRAC.Core.Utilities import DEncode
3from DIRAC.Core.Base.ExecutorModule import ExecutorModule
4
5
6class PingPongExecutor(ExecutorModule):
7 @classmethod
8 def initialize(cls):
9 """
10 Executors need to know to which mind they have to connect.
11 """
12 cls.ex_setMind("Test/PingPongMind")
13 return S_OK()
14
15 def processTask(self, taskid, taskData):
16 """
17 This is the function that actually does the work. It receives the task,
18 does the processing and sends the modified task data back.
19 """
20 taskData["bouncesLeft"] -= 1
21 return S_OK(taskData)
22
23 def deserializeTask(self, taskStub):
24 """
25 Tasks are received as a stream of bytes. They have to be converted from that into a usable object.
26 """
27 return S_OK(DEncode.decode(taskStub)[0])
28
29 def serializeTask(self, taskData):
30 """
31 Before sending the task back to the mind it has to be serialized again.
32 """
33 return S_OK(DEncode.encode(taskData))
All Executor modules need to know to which mind they have to connect. In the initialize method we define the mind to which the module will connect. This method can also have any other initialization required by the Executor.
Function processTask does the task processing. It receives the task to be processed already deserialized. Once the work is done it can to return the modified task or just and empty S_OK.
The last two methods provide the knowledge on how to serialize and deserialize tasks when receiving and sending them to the Mind.
Running an Executor
Executor modules are run by the dirac-executor script. This allows to run more than one module by the same process. Jusk invoke dirac-executor passing as parameter all the required modules. It will group all the modules by Mind and create just one connection to the each requested Mind. Minds will know how to handle Executors running more than one module.
Implementing a Mind
The Mind is a bit more complex. It has to:
Dispatch tasks to executors that can handle them. A Mind can have more than one type of Executor module connected. So it has to decide which module type will handle the task. For instance there may be two Executor modules connected, the task has to be processed by module 1 and then by module 2. So the mind has to decide to send the task first to module 1, and once it comes back then send it to module 2.
It has to either get notified or check some resource to start executing a task. Once the task has been processed it has to store back the result to the database or to wherever the result has to go.
A simple example follows:
1""" Example of ExecutorMindHandler implementation
2"""
3
4import time
5import random
6from DIRAC import S_OK, gLogger
7from DIRAC.Core.Utilities import DEncode
8from DIRAC.Core.Base.ExecutorMindHandler import ExecutorMindHandler
9
10random.seed()
11
12sLog = gLogger.getSubLogger(__name__)
13
14
15class PingPongMindHandler(ExecutorMindHandler):
16 MSG_DEFINITIONS = {"StartReaction": {"numBounces": int}}
17
18 auth_msg_StartReaction = ["all"]
19
20 def msg_StartReaction(self, msgObj):
21 bouncesLeft = msgObj.numBounces
22 taskData = {"bouncesLeft": bouncesLeft}
23 return self.executeTask(time.time() + random.random(), taskData)
24
25 auth_startPingOfDeath = ["all"]
26 types_startPingOfDeath = [int]
27
28 def export_startPingOfDeath(self, numBounces):
29 taskData = {"bouncesLeft": numBounces}
30 sLog.info("START TASK", f"{taskData}")
31 return self.executeTask(int(time.time() + random.random()), taskData)
32
33 @classmethod
34 def exec_executorConnected(cls, trid, eTypes):
35 """
36 This function will be called any time an executor reactor connects
37
38 eTypes is a list of executor modules the reactor runs
39 """
40 sLog.info("EXECUTOR CONNECTED OF TYPE", f"{eTypes}")
41 return S_OK()
42
43 @classmethod
44 def exec_executorDisconnected(cls, trid):
45 """
46 This function will be called any time an executor disconnects
47 """
48 return S_OK()
49
50 @classmethod
51 def exec_dispatch(cls, taskid, taskData, pathExecuted):
52 """
53 Before a task can be executed, the mind has to know which executor module can process it
54 """
55 sLog.info("IN DISPATCH", f"{taskData}")
56 if taskData["bouncesLeft"] > 0:
57 sLog.info("SEND TO PLACE")
58 return S_OK("Test/PingPongExecutor")
59 return S_OK()
60
61 @classmethod
62 def exec_prepareToSend(cls, taskId, taskData, trid):
63 """ """
64 return S_OK()
65
66 @classmethod
67 def exec_serializeTask(cls, taskData):
68 sLog.info("SERIALIZE", f"{taskData}")
69 return S_OK(DEncode.encode(taskData))
70
71 @classmethod
72 def exec_deserializeTask(cls, taskStub):
73 sLog.info("DESERIALIZE", f"{taskStub}")
74 return S_OK(DEncode.decode(taskStub)[0])
75
76 @classmethod
77 def exec_taskProcessed(cls, taskid, taskData, eType):
78 """
79 This function will be called when a task has been processed and by which executor module
80 """
81 sLog.info("PROCESSED", f"{taskData}")
82 taskData["bouncesLeft"] -= 1
83 return cls.executeTask(taskid, taskData)
84
85 @classmethod
86 def exec_taskError(cls, taskid, taskData, errorMsg):
87 print("OOOOOO THERE WAS AN ERROR!!", errorMsg)
88 return S_OK()
89
90 @classmethod
91 def exec_taskFreeze(cls, taskid, taskData, eType):
92 """
93 A task can be frozen either because there are no executors connected that can handle it
94 or becase an executor has requested it.
95 """
96 print("OOOOOO THERE WAS A TASK FROZEN")
97 return S_OK()
As shown in the example, Minds are DIRAC services so they can use any capability available. In the example we define a message called ‘StartReaction’. Each time the Mind receives that message it will add a task to be processed. For this example, a task is just a dictionary with one key having one number as value. This number will define how many times the task will go to an Executor to be processed. Each time an Executor processes a task we will just reduce the number of bounces left.
The Mind also has two methods to react when an Executor connects or disconnects. Keep in mind that each Executor can have more than one module as explained in section Running an Executor. The connect callback will give the Mind the list of modules the Executor has.
The exec_dispatch method is quite important. It decides which Executor module has to process the task. Returning an empty S_OK means that no module has to process this task and thus that this task can now be forgotten. In the example exec_dispatch will just look at the number of bounces our task has done. If there are still bounces to do it will just say that the Framework/PingPong Executor has to process the task and no module if there are no bounces left to do.
Methods exec_serialize and exec_deserialize have to provide a mechanism for packing and unpacking tasks from byte arrays. Executors have the same mechanism in methods serialize and deserialize. In fact, it is highly recommended that Executors and their Minds share this methods.
Method exec_prepareToSend allows the Mind to prepare before sending a task. It is not required to overwrite this method. It’s there in case some Mind needs it.
All that’s left are callbacks for when tasks come back from Executors:
exec_taskDone will be called if the task has been processed without error. In this method the Mind can save the new state into a database, notify a resource…
exec_taskError wil be called if the Executor has found any error while processing the task. After this method the Mind will forget about the task.
exec_taskFreeze will be called if the Executor requests to freeze the task for some time. For instance an Executor can process a task and decide that it has to be retried later. It can just freeze the task for a certain amount of time. The Mind will keep this tast for at least that amount of time. It can keep it for more time if there aren’t free Executors to handle it.